MAT 370: Solving Non-Linear Systems
A Multidimensional Newton-Raphson Method
March 4, 2026
Motivation and Context
You spent an entire semester learning about linear systems and their solutions.
Unfortunately, throw a non-linear system at you, and you’ve got nearly no tools available to your for solving it!
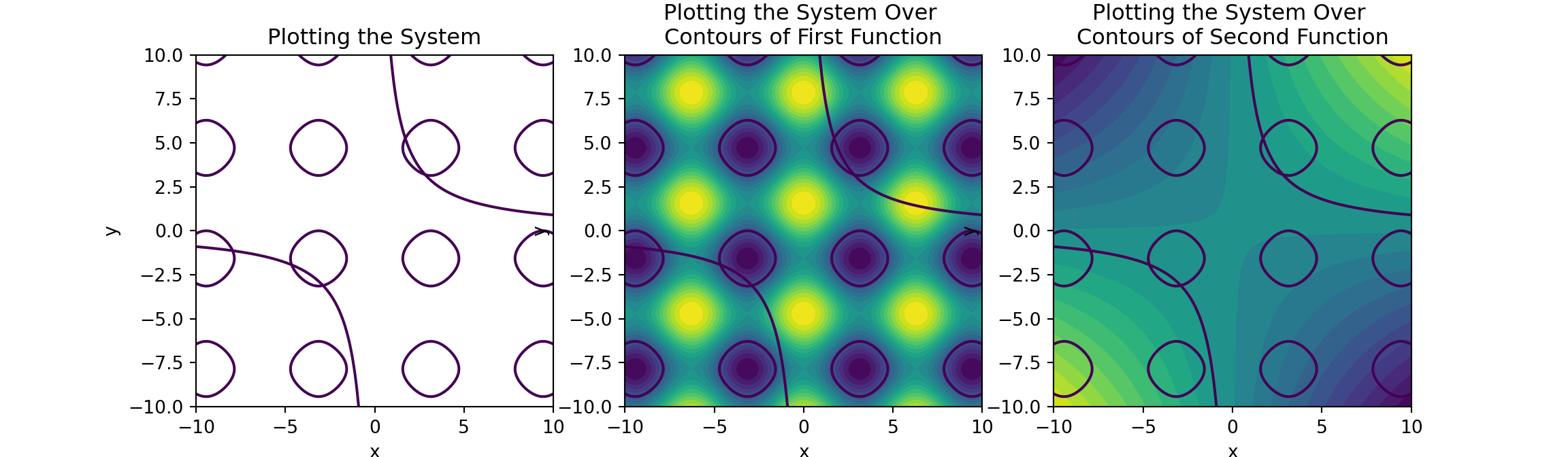
\[\left\{\begin{array}{rcr} \cos\left(x\right) + \sin\left(y\right) + 1 & = & 0\\ xy - 9 & = & 0\end{array}\right.\]
That changes today!
Example Usage
Example 1: Use the Mutli-Dimensional Newton-Raphson routine you just constructed to determine the points of intersection between the circle \(x^2 + y^2 = 3\) and the hyperbola \(xy = 1\).
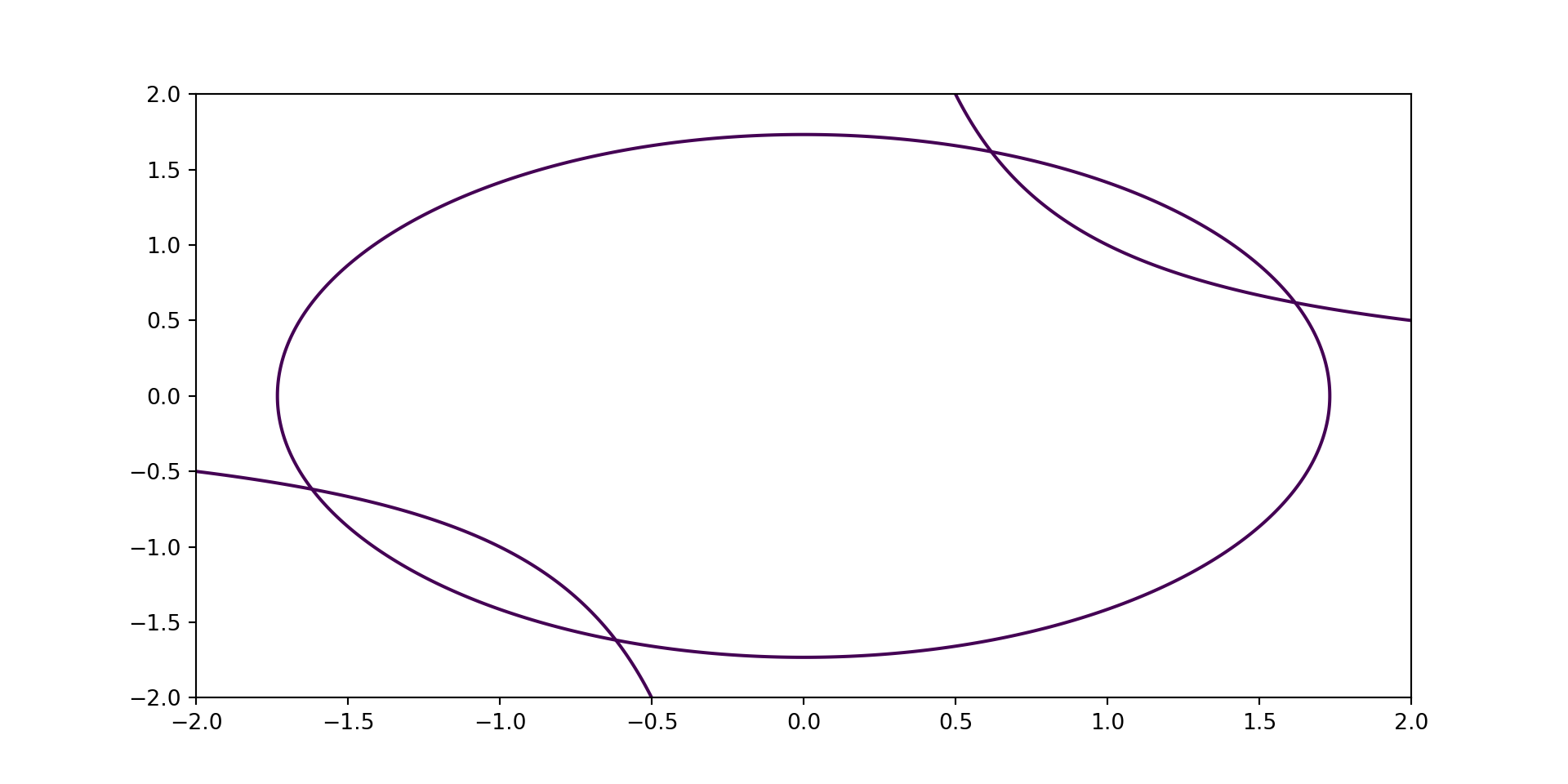
I found the four intersection points to be at:
[-1.61803399 -0.61803399] (upper left)
[-0.61803399 -1.61803399] (lower left)
[0.61803399 1.61803399] (upper right)
[1.61803399 0.61803399] (lower right)def f(x):
F = np.zeros(2)
F[0] = x[0]**2 + x[1]**2 -3
F[1] = x[0]*x[1] - 1
return F
est_upper_left = newtonRaphsonMultiDim(f, [-0.5, 0])
est_lower_left = newtonRaphsonMultiDim(f, [0, -1.5])
est_upper_right = newtonRaphsonMultiDim(f, [0.5, 1.5])
est_lower_right = newtonRaphsonMultiDim(f, [1.5, 0.5])
print("I found the four intersection points to be at:\n",
"\t", est_upper_left, "(upper left)\n",
"\t", est_lower_left, "(lower left)\n",
"\t", est_upper_right, "(upper right)\n",
"\t", est_lower_right, "(lower right)")