MAT 370: Linear Interpolation for Root-Finding
Secant and False-Position Methods
March 13, 2026
Motivation and Context
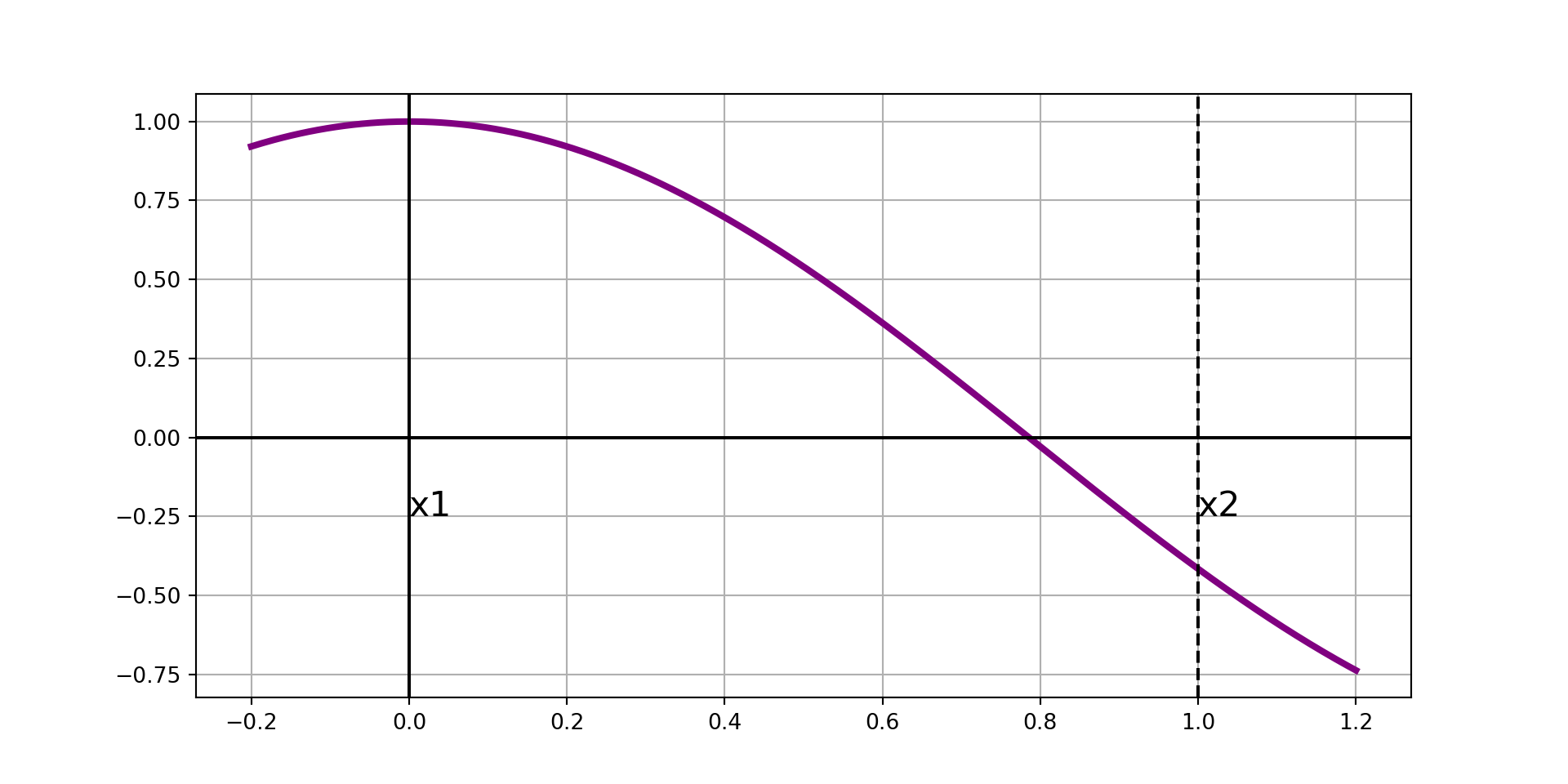
In the previous notebook we introduced the method of bisection to close in on a root of a function \(f\left(x\right)\), given a bracketed interval \(\left[x_1, x_2\right]\).
We saw that the bisection method gets closer to the root by halving the bracketed interval at each interation and choosing the half-interval over which \(f\left(x\right)\) remains bracketed to continue searching within.
Rather than simply choosing the midpoint of the current bracketed interval as an endpoint for the next iteration, linear interpolation methods construct linear approximations of \(f\left(x\right)\) and use the root of the linear interpolant as an endpoint for their next iteration.
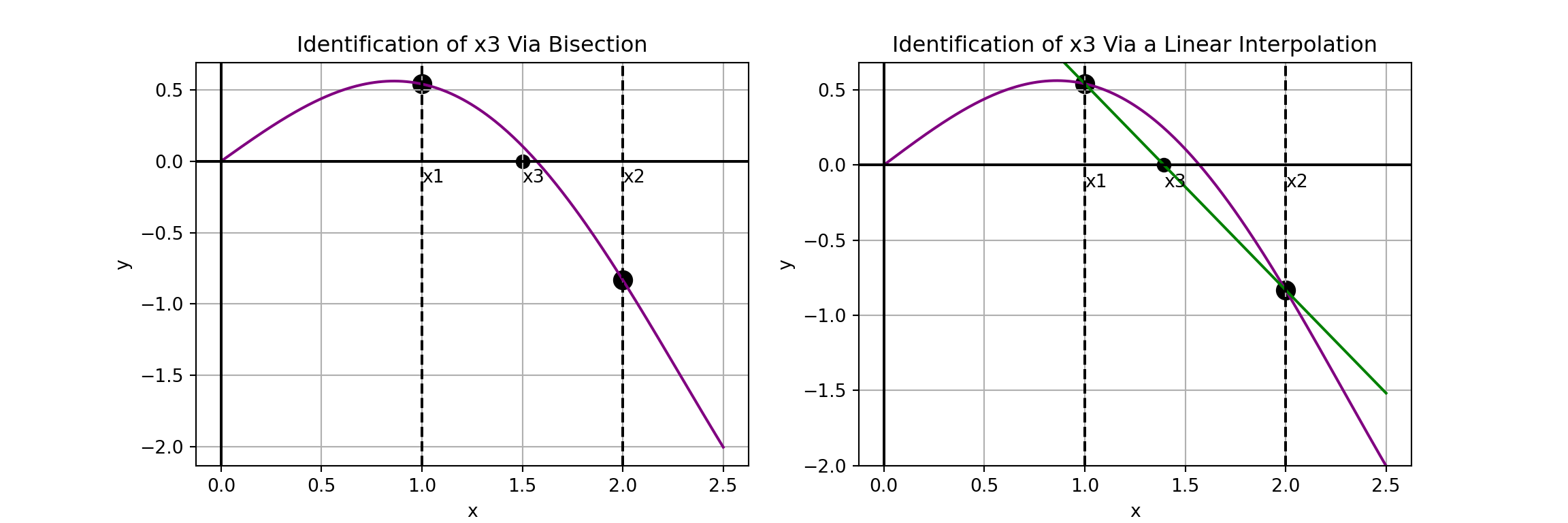
Basic Linear Interpolants
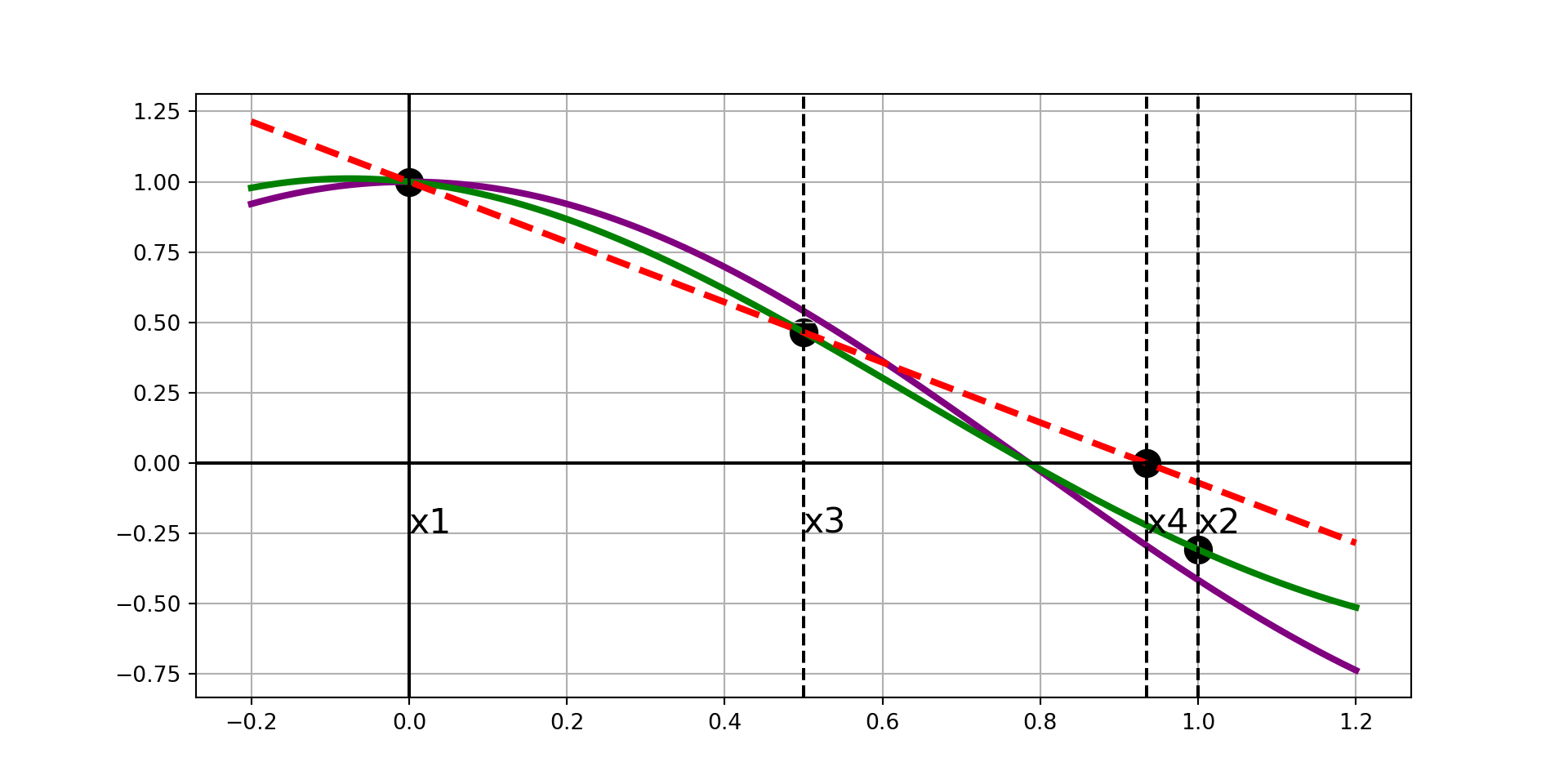
There are two very basic types of linear interpolation – the secant method and the false position method.
Both of which are illustrated in the graph in the right panel from the previous slide and below.
They methods differ in two ways.
- The secant method does not require a bracketed interval but the false position method does
- The secant method always chooses the interval between \(x_2\) and \(x_3\) as the interval for its next iteration, where the false position method chooses the bracketed interval.
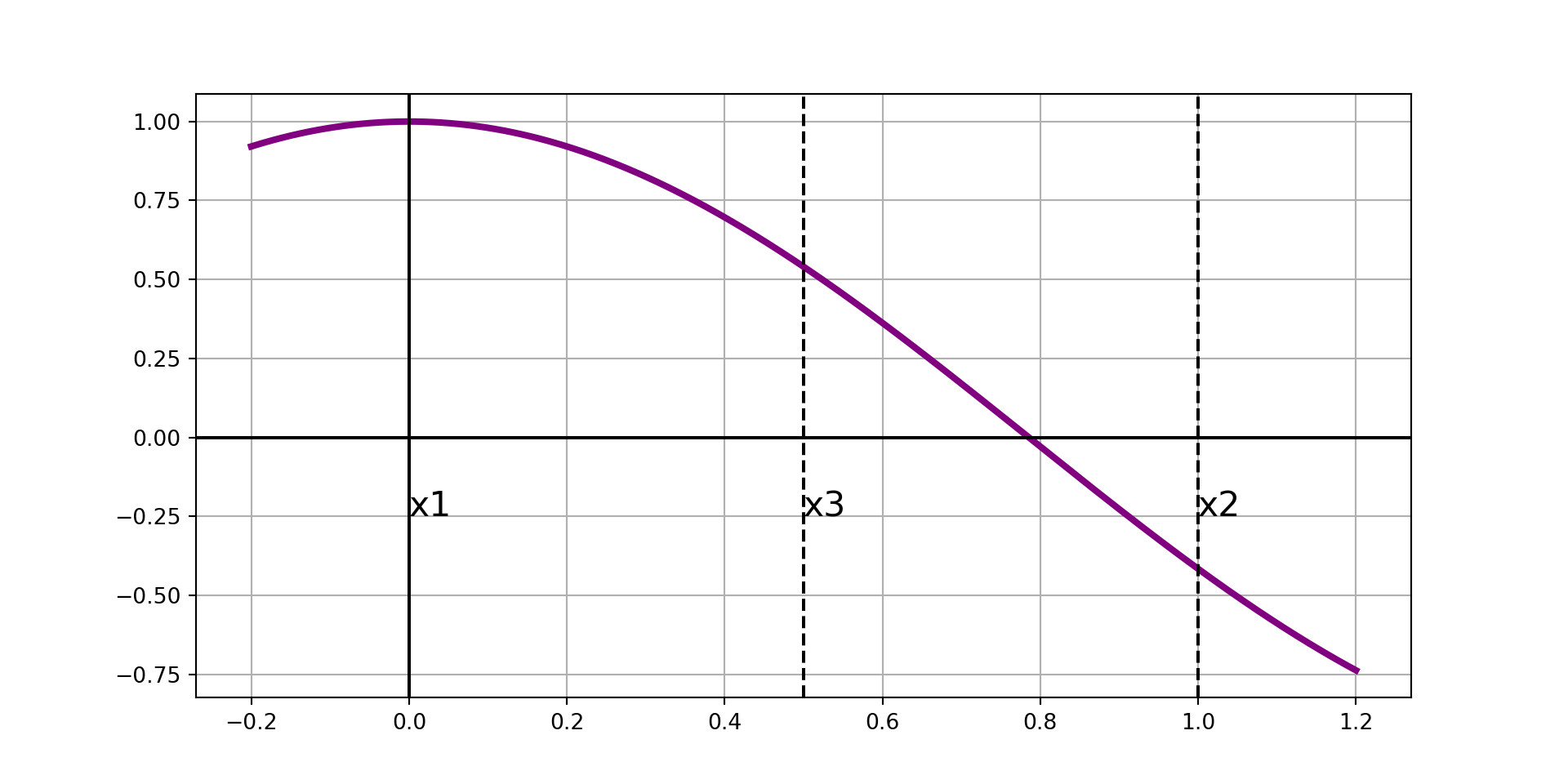
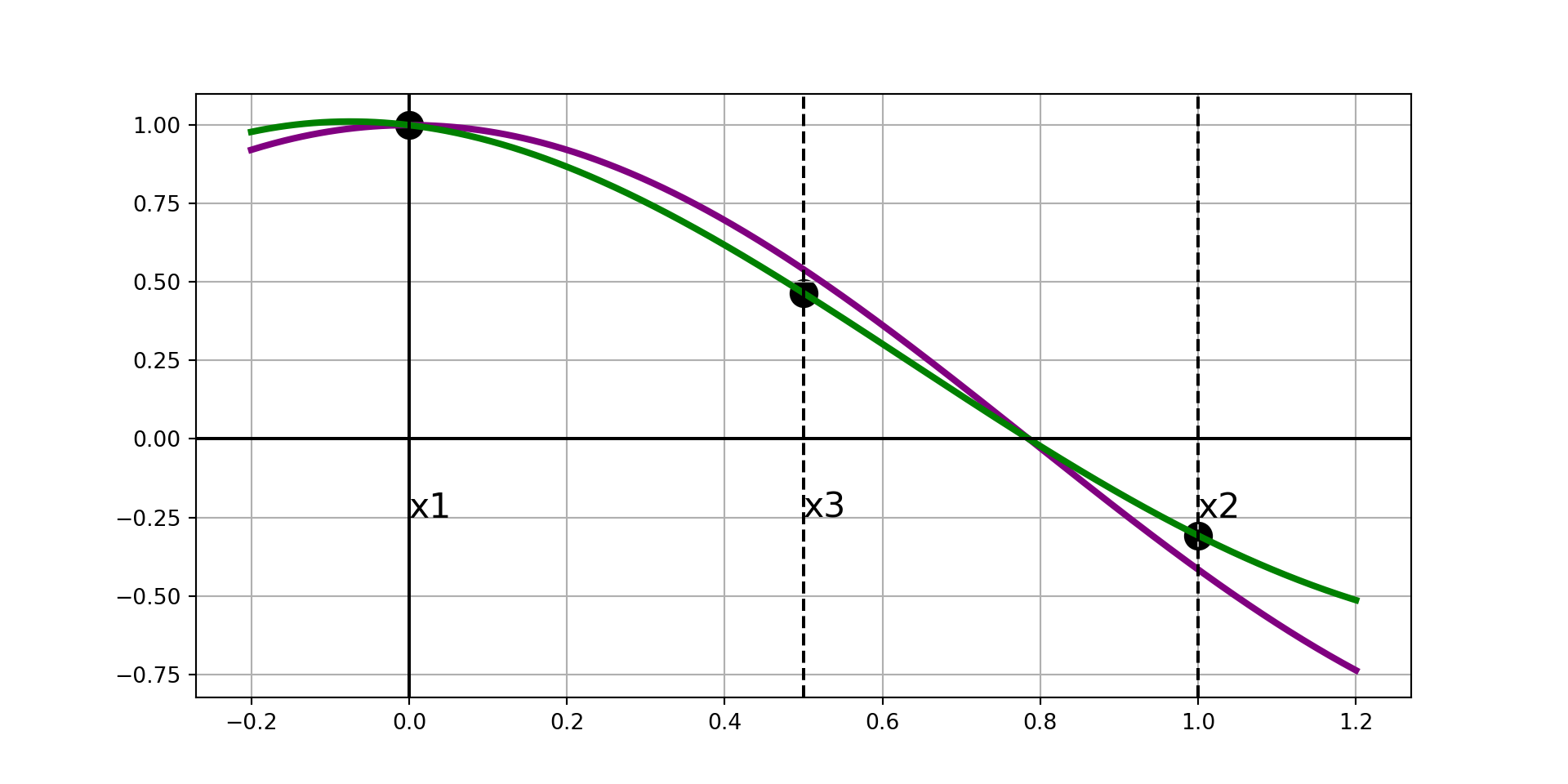
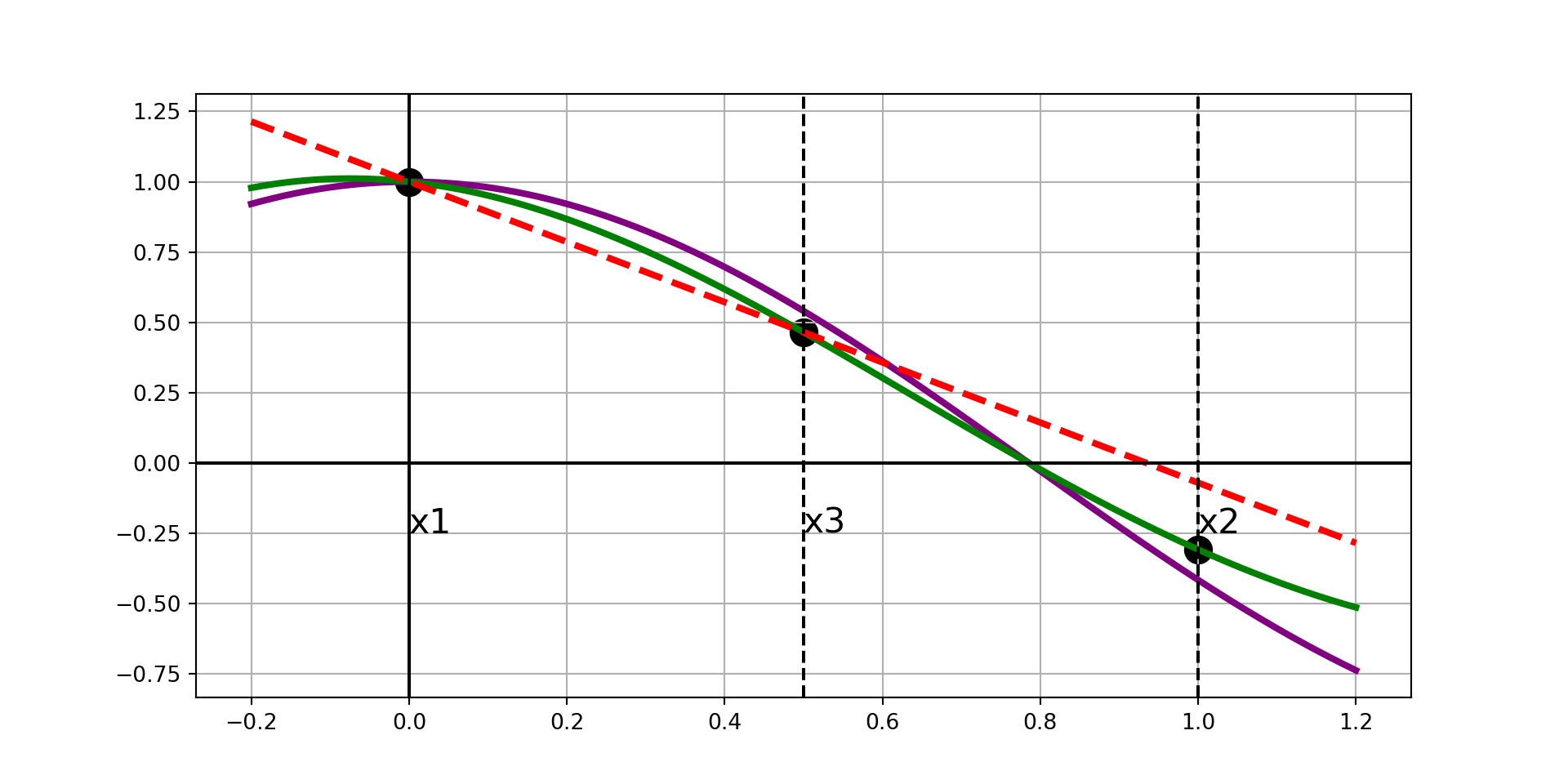
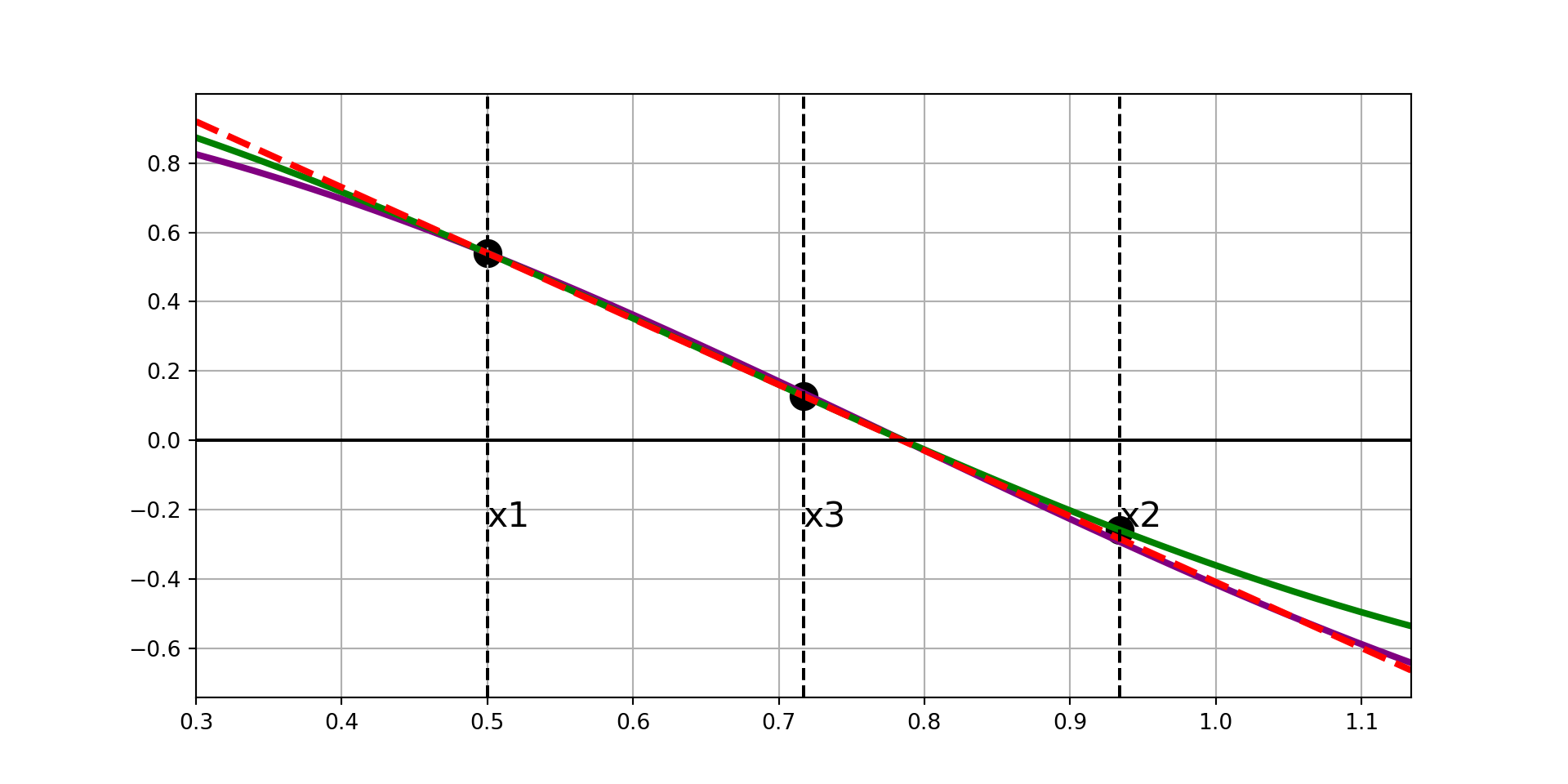
Secant Method
Given any interval, \(\left[x_1, x_2\right]\), the strategy for the secant method is easy to describe:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- Replace \(x_1\) with \(x_2\) and replace \(x_2\) with \(x_3\)
- Repeat steps 1 - 3 until the stopping condition is reached.
- Note: Running the secant method for too many iterations can result in incorrect results. A common stopping condition is to stop when the distance between \(x_2\) and \(x_3\) is below some tolerance.
- Common issues include diverging away from the root or falling into a cyclic rotation.
The predicted root is: 1.393635355304309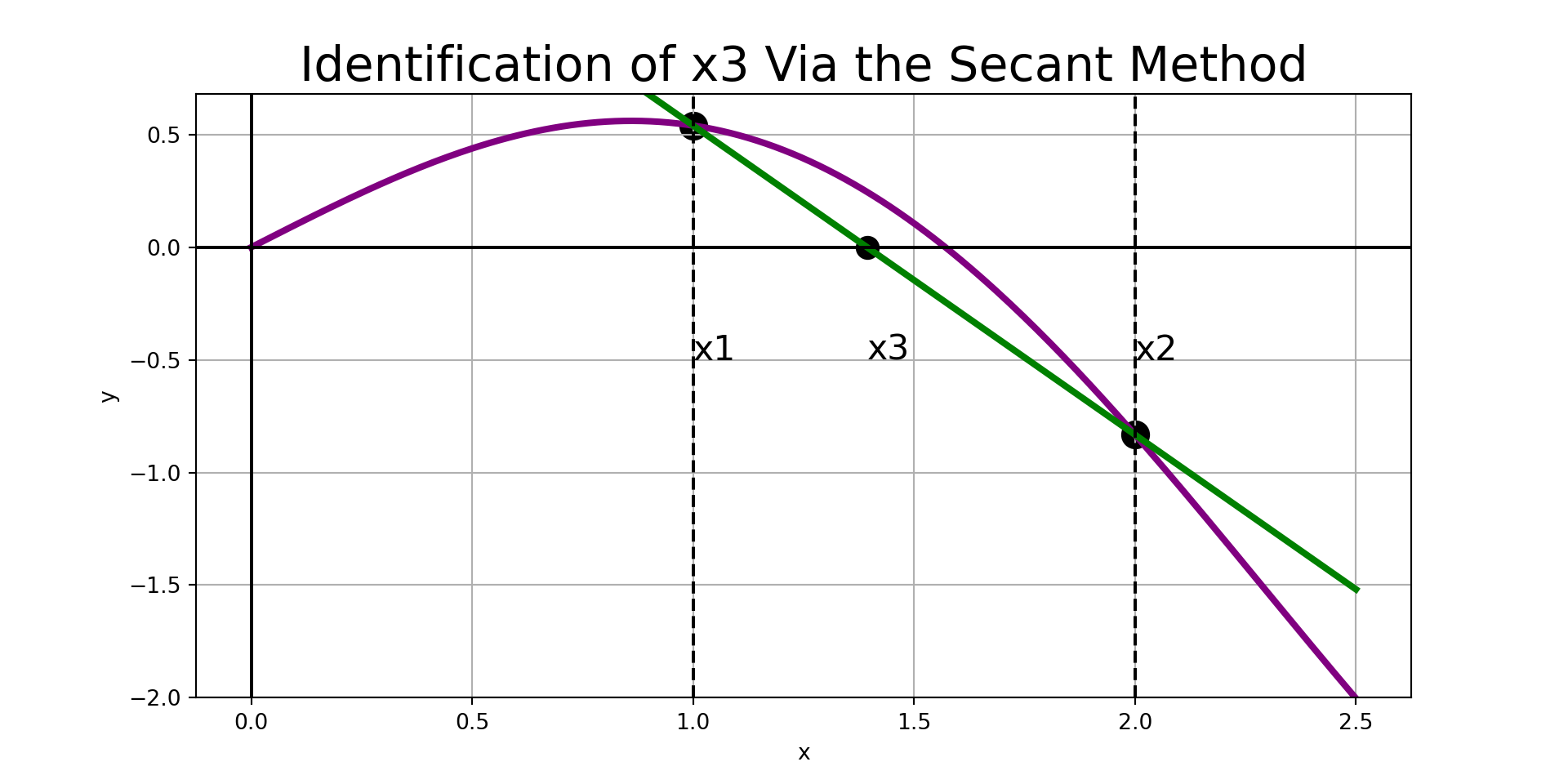
Secant Method
Given any interval, \(\left[x_1, x_2\right]\), the strategy for the secant method is easy to describe:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- Replace \(x_1\) with \(x_2\) and replace \(x_2\) with \(x_3\)
- Repeat steps 1 - 3 until the stopping condition is reached.
- Note: Running the secant method for too many iterations can result in incorrect results. A common stopping condition is to stop when the width of the interval is below some tolerance.
- Common issues include diverging away from the root or falling into a cyclic rotation.
The predicted root is: 1.531801401159806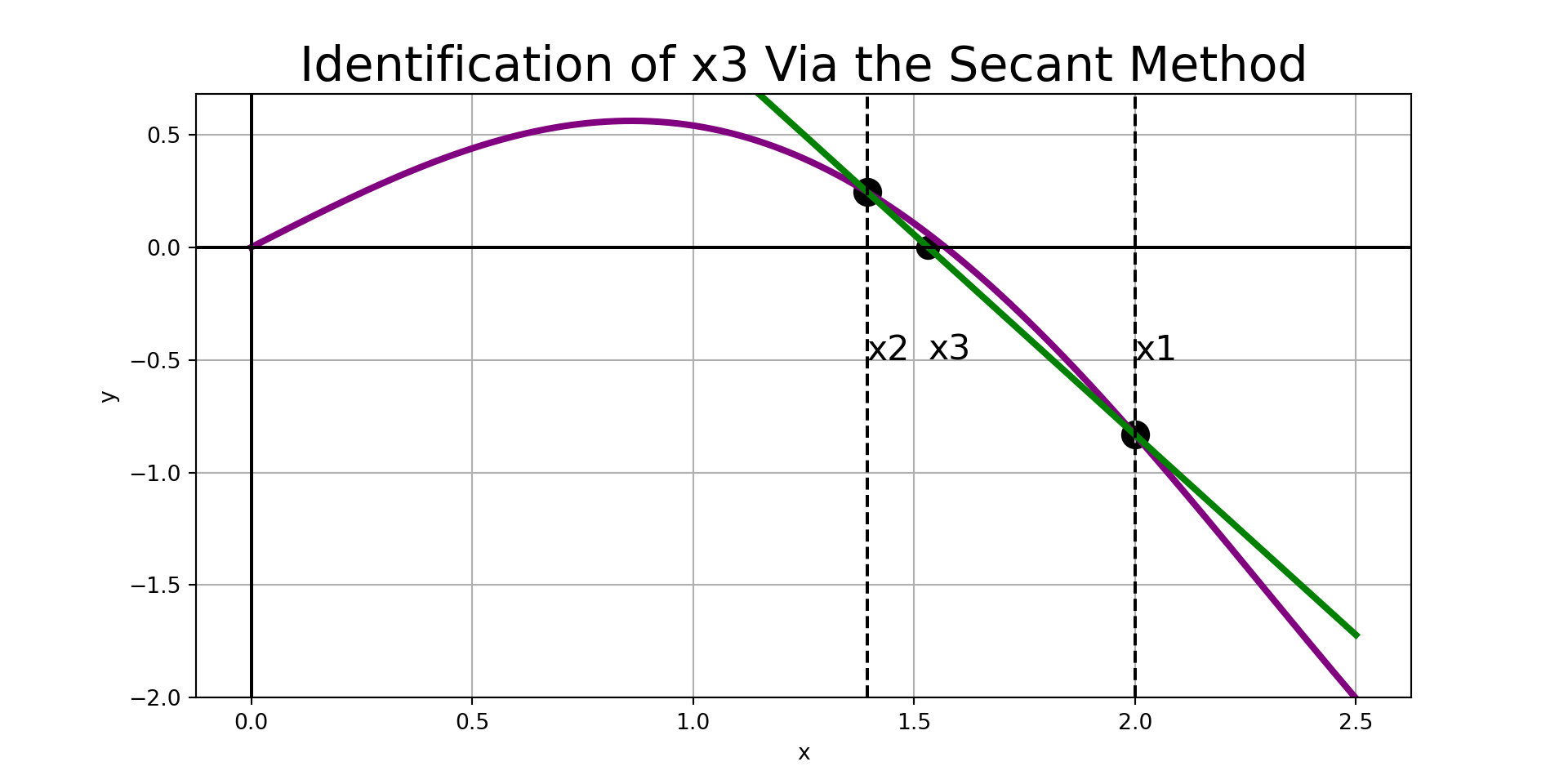
Secant Method
Given any interval, \(\left[x_1, x_2\right]\), the strategy for the secant method is easy to describe:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- Replace \(x_1\) with \(x_2\) and replace \(x_2\) with \(x_3\)
- Repeat steps 1 - 3 until the stopping condition is reached.
- Note: Running the secant method for too many iterations can result in incorrect results. A common stopping condition is to stop when the width of the interval is below some tolerance.
- Common issues include diverging away from the root or falling into a cyclic rotation.
The predicted root is: 1.5761871866579347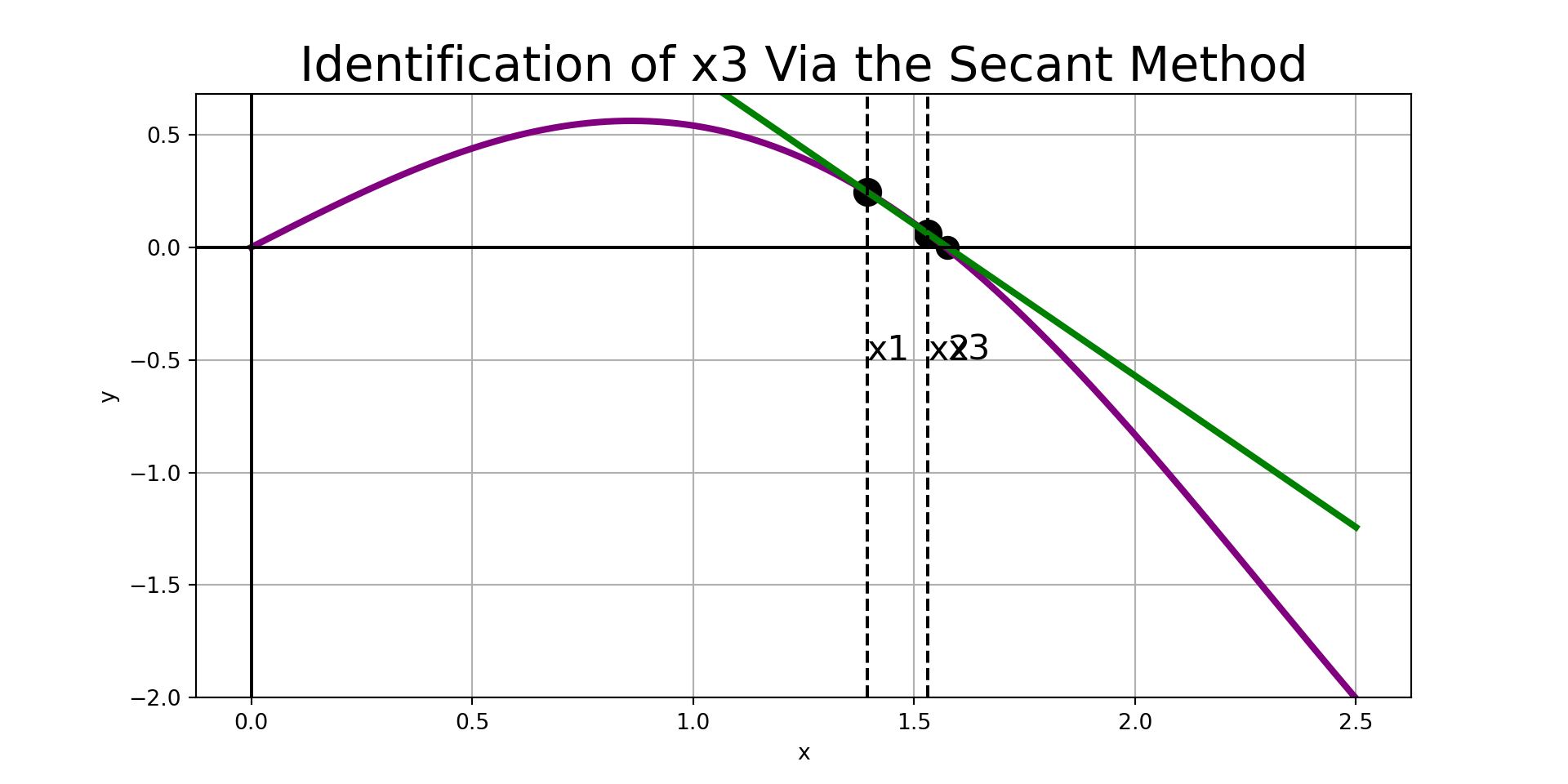
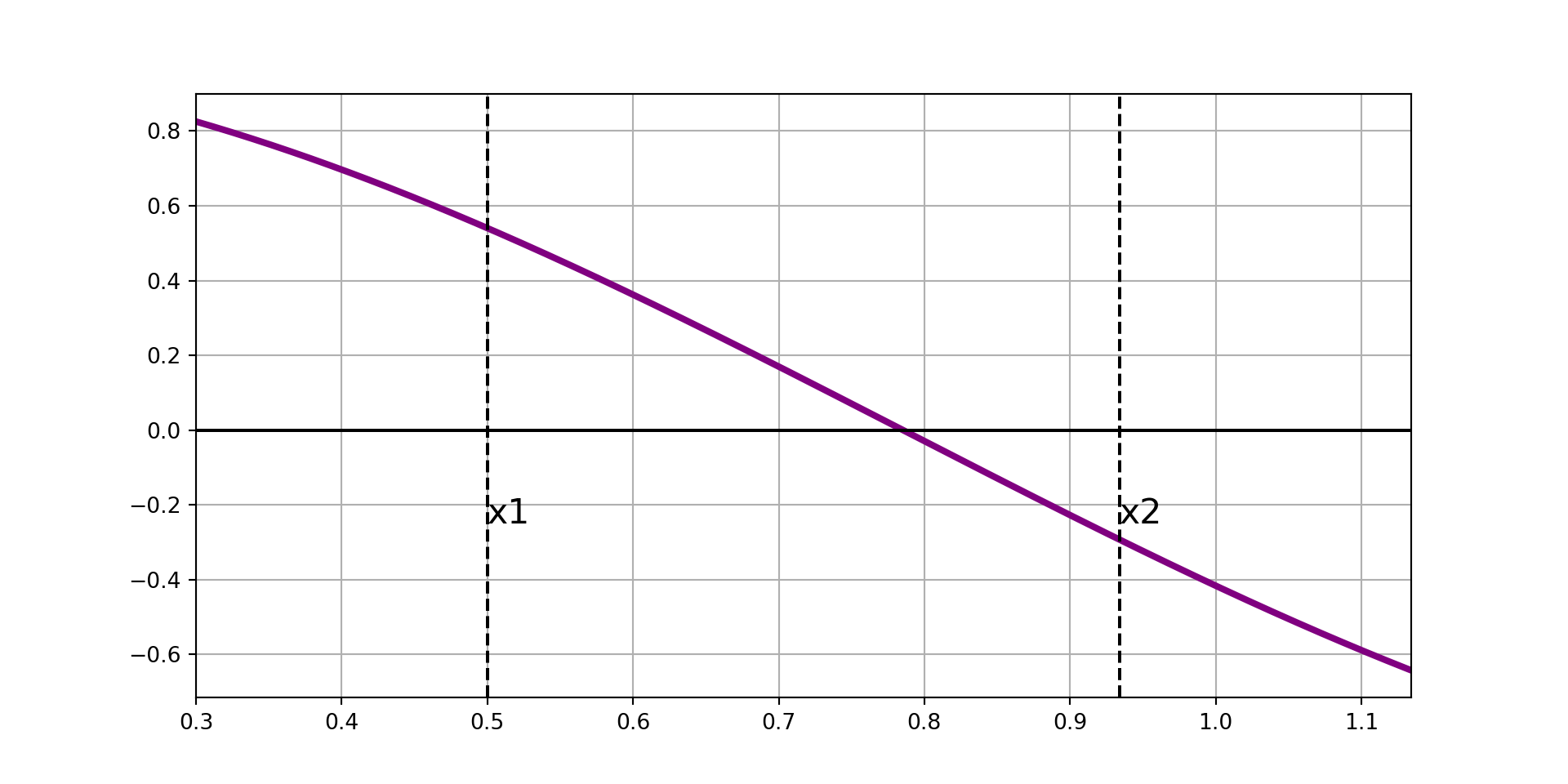
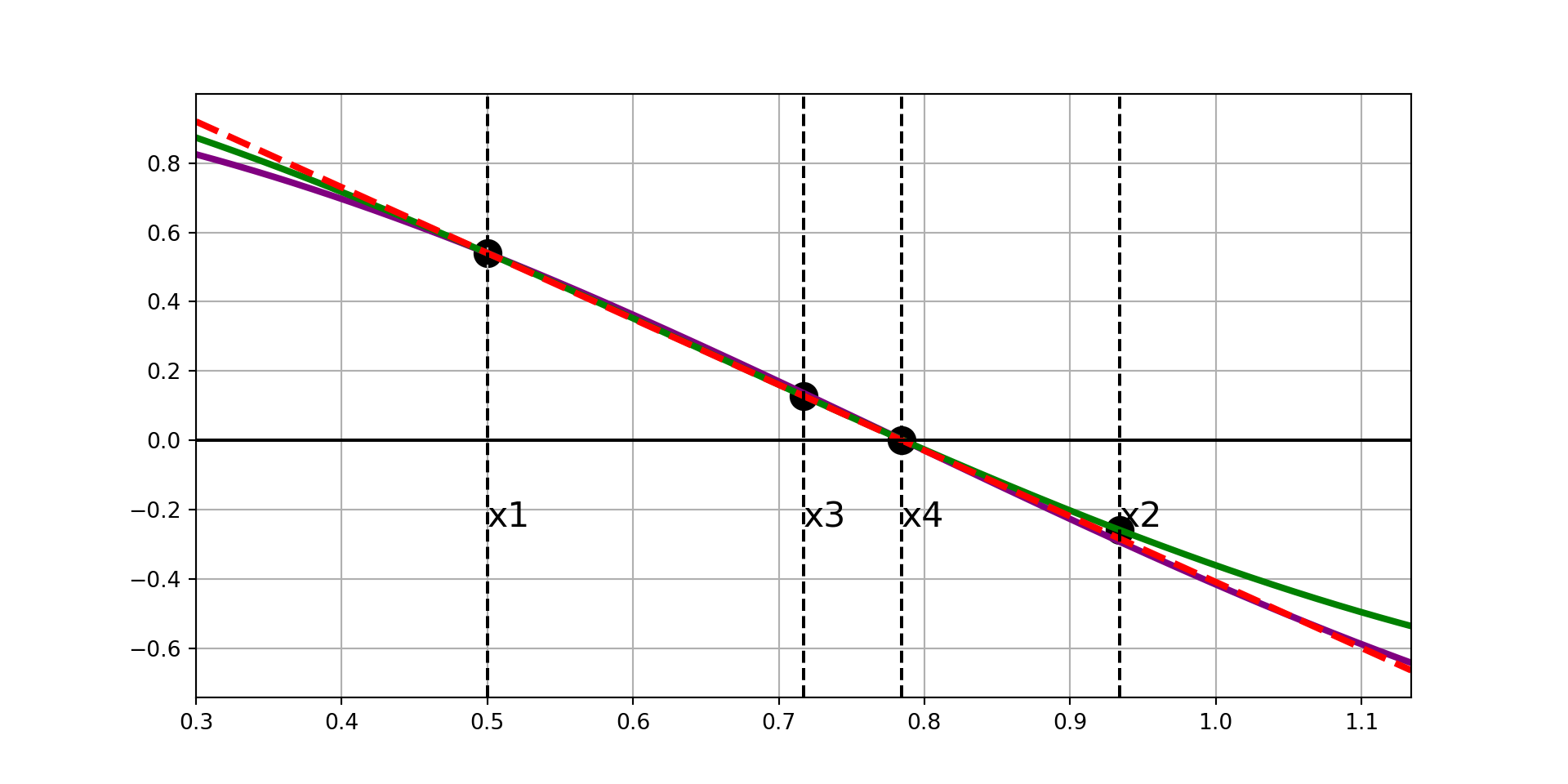
False Position Methods (I)
Given a bracketed interval, the strategy of our first false position method is also simple:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- If \(\left[x_1, x_3\right]\) brackets \(f\left(x\right)\), then replace \(x_2\) with \(x_3\). Otherwise, replace \(x_1\) with \(x_3\).
- Repeat steps 1 - 3 until the desired accuracy is achieved.
The predicted root is: 1.393635355304309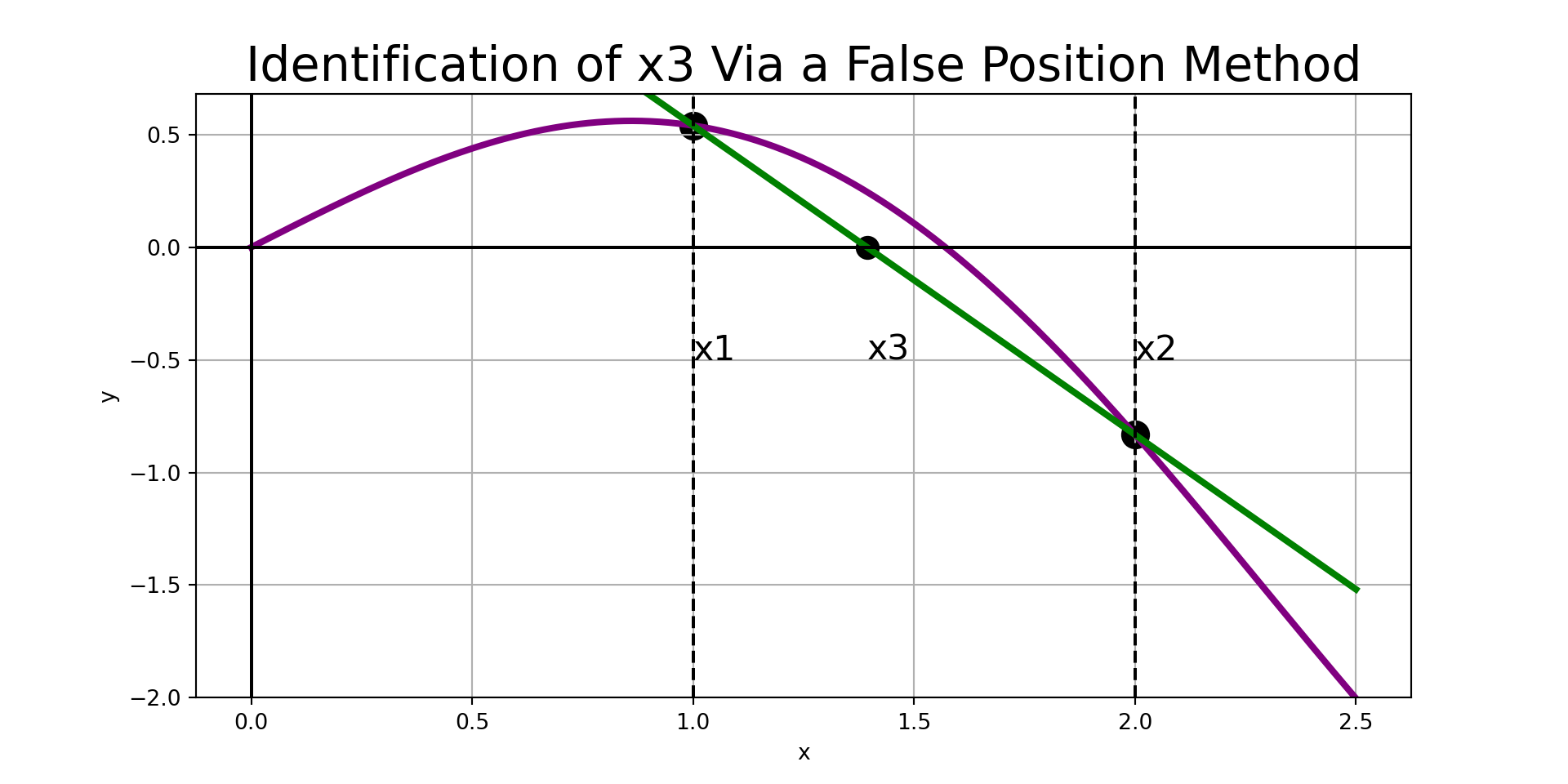
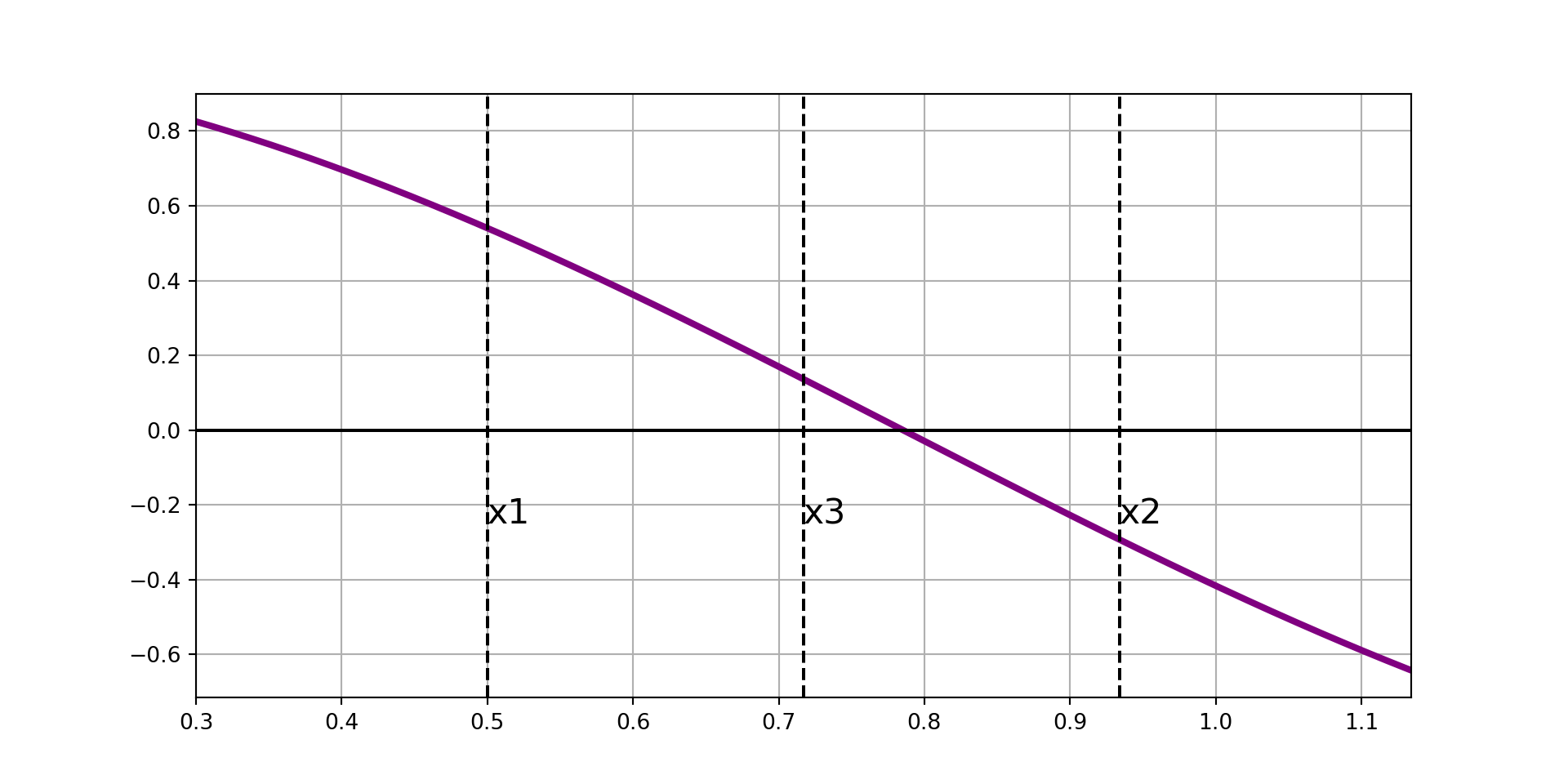
False Position Methods (I)
Given a bracketed interval, the strategy of our first false position method is simple:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- If \(\left[x_1, x_3\right]\) brackets \(f\left(x\right)\), then replace \(x_2\) with \(x_3\). Otherwise, replace \(x_1\) with \(x_3\).
- Repeat steps 1 - 3 until the desired accuracy is achieved.
The predicted root is: 1.5317912879212798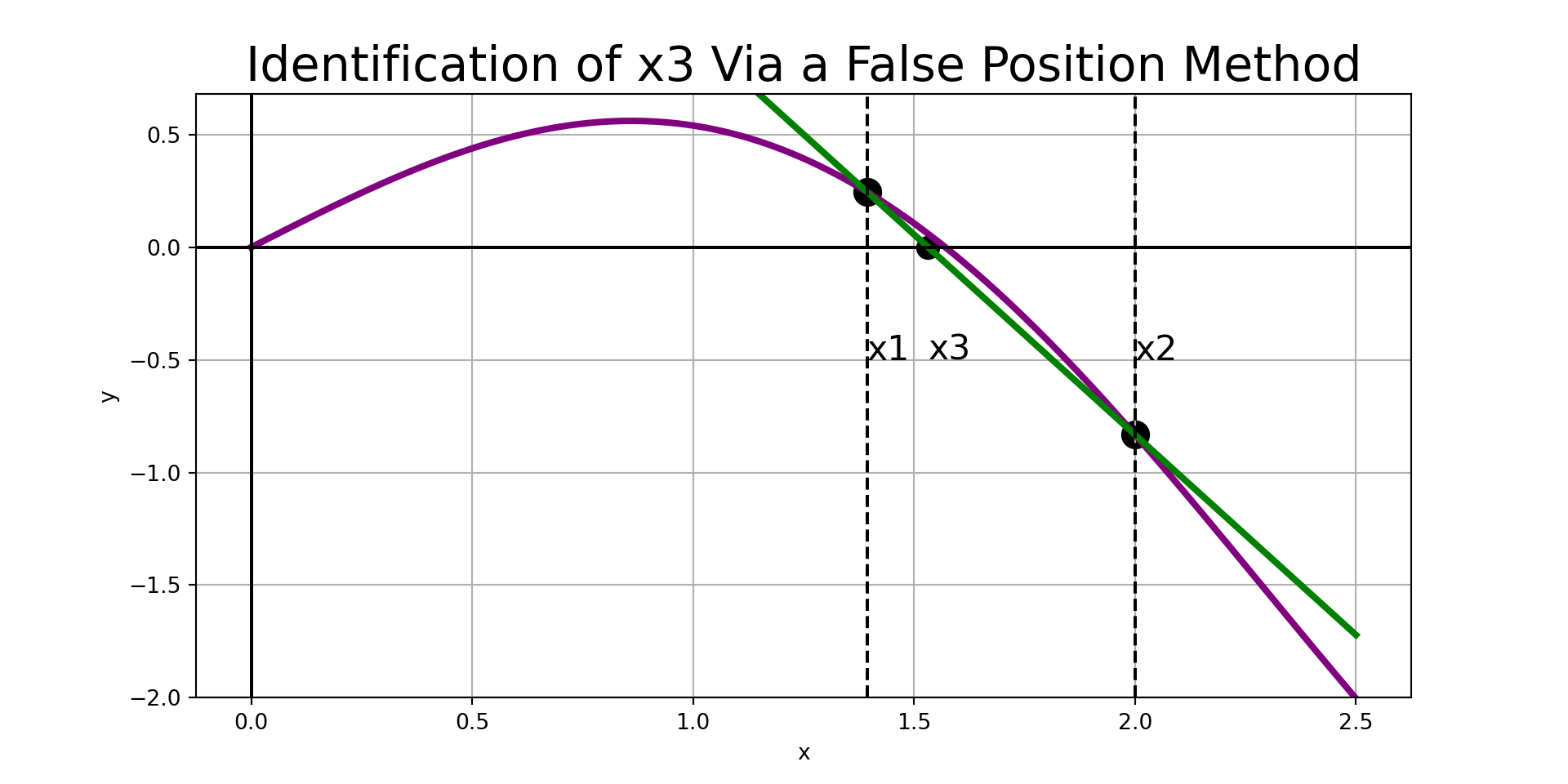
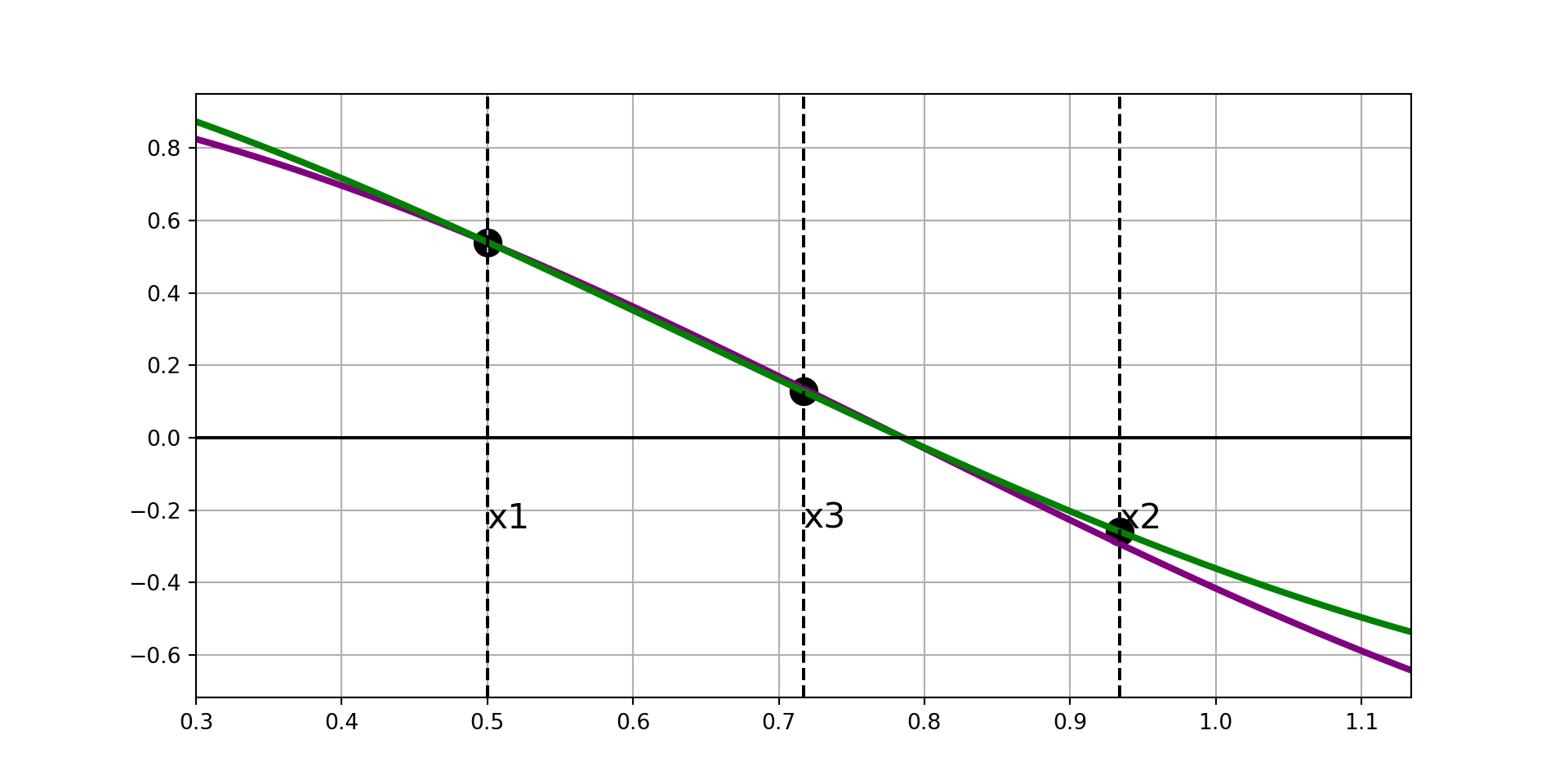
False Position Methods (I)
Given a bracketed interval, the strategy of our first false position method is simple:
- Construct the secant line to \(f\left(x\right)\) through \(\left(x_1, f\left(x_1\right)\right)\) and \(\left(x_2, f\left(x_2\right)\right)\).
- Find the root associated with the secant line and label it \(x_3\).
- If \(\left[x_1, x_3\right]\) brackets \(f\left(x\right)\), then replace \(x_2\) with \(x_3\). Otherwise, replace \(x_1\) with \(x_3\).
- Repeat steps 1 - 3 until the desired accuracy is achieved.
The predicted root is: 1.5631455475829248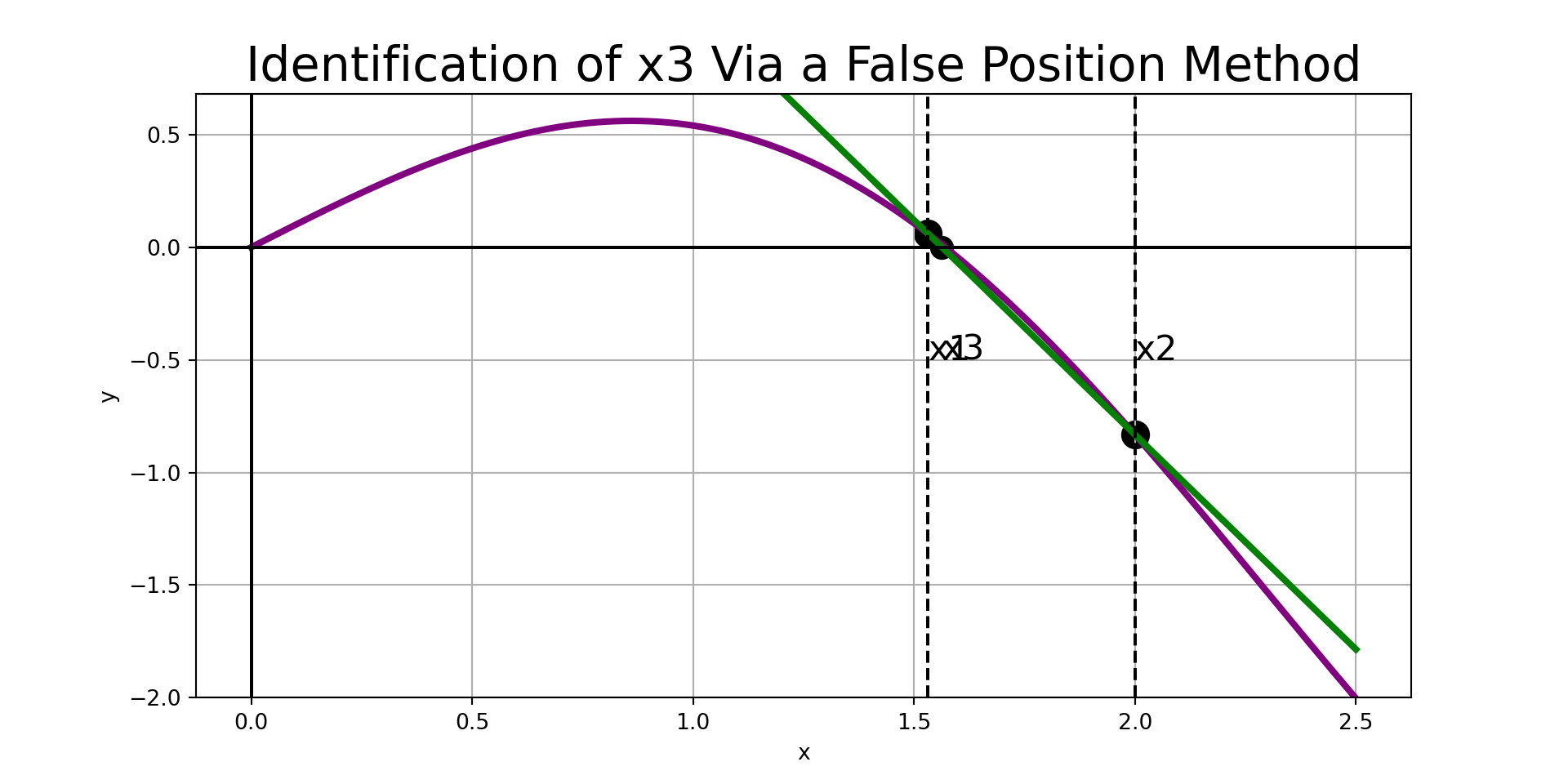
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Ridder’s Method, Visually
Now that we’ve built some visual intuition, we’ll dig into the math behind the scenes.
Convergence Concerns
The convergence of the Newton-Raphson Method (using tangent lines to find roots) depends on the proximity of \(x_n\) to the desired root and the curvature of \(f\left(x\right)\) at \(x_n\). See the two scenarios below:
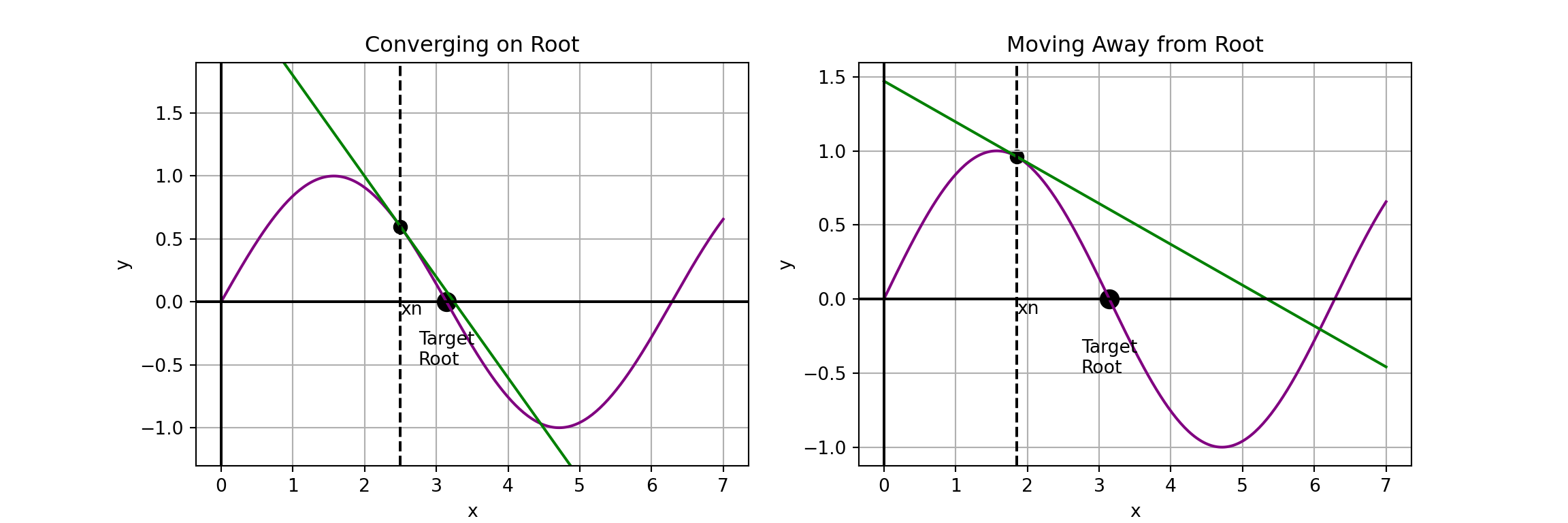
In each case above, our next estimate of the target root is the root of the tangent line.
In the plot on the right, we can see that the next iteration of the Newton-Raphson Method will result in an approximation which moves even further from the target root.
Takeaway: The Newton-Raphson Method requires a reasonably good initial estimate for the target root in order for it to converge to the correct root.